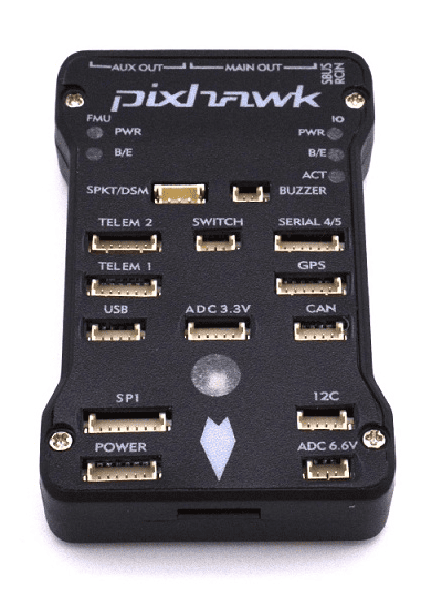
The Pixhawk 2.4.8 Drone Flight Controller (PX4 32-Bit Autopilot) is a popular and widely supported autopilot board used in DIY drones, UAVs and autonomous robotic platforms. It runs on a 32-bit PX4 open-source firmware stack, enabling advanced flight control, autonomous mission planning and adaptive stabilization for a wide range of airframes including quadcopters, hexacopters, fixed-wing and VTOL vehicles.
This controller integrates multiple inertial sensors such as gyroscopes, accelerometers and often a built-in compass/IMU to provide attitude estimation, stabilization and GPS-based navigation. The board’s robust electronics and comprehensive interface support make it compatible with external GPS modules, telemetry radios, ESCs, RC receivers, companion computers and camera gimbals.
Pixhawk 2.4.8 is compatible with both PX4 and ArduPilot firmware, allowing users flexibility in choosing the software ecosystem that best suits their application, whether it’s advanced autonomous missions, waypoint control, RTK/RTK GPS integration or object avoidance tasks.